Essentially we need to answer the questions:
a. How to customize linux kernel for the different usage of the BeagleBoneBlack device?
b. How to write linux kernel module for low level hardware control?
c How to trace through and debug system and applications at runtime?
Getting started guide:
http://beagleboard.org/Getting%20Started
The latest images are available here:
http://beagleboard.org/latest-images
On my PC host, “ifconfig -a” gave:
eth2 Link encap:Ethernet HWaddr c4:ed:ba:7c:25:01
inet addr:192.168.7.1 Bcast:192.168.7.3 Mask:255.255.255.252
And this happened when the BBB interface is plugged into the USB of the PC host directly.
On the BeagleBoneBlack interface the IP address is: 192.168.7.2.
Details info is given here:
http://www.circuidipity.com/getting-started-with-beaglebone-black.html
After ssh into the BeagleBoneBlack as root:
cat /proc/cpuinfo
processor : 0
model name : ARMv7 Processor rev 2 (v7l)
BogoMIPS : 297.40
Features : swp half thumb fastmult vfp edsp thumbee neon vfpv3 tls
and so on. And you can view all the /sys interface as well as dmesg for more information.
In the /boot directory is a list of all the dtb (device-tree-blob) used by Angstrom, so to output the original source file:
dtc -I dtb -O dts am335x-boneblack.dtb |more
/dts-v1/;
/ {
#address-cells = <0x1>;
#size-cells = <0x1>;
compatible = “ti,am335x-bone”, “ti,am33xx”;
interrupt-parent = <0x1>;
model = “TI AM335x BeagleBone”;chosen {
};aliases {
serial0 = “/ocp/serial@44e09000”;
serial1 = “/ocp/serial@48022000”;
serial2 = “/ocp/serial@48024000”;
serial3 = “/ocp/serial@481a6000”;
serial4 = “/ocp/serial@481a8000”;
serial5 = “/ocp/serial@481aa000”;
};
<…>
To enabling DNS connectivity to internet these are the following steps:
On the host side (192.168.7.1) issue the command:
iptables -A POSTROUTING -t nat -j MASQUERADE
echo 1 | sudo tee /proc/sys/net/ipv4/ip_forward
After that you can “cat /proc/sys/net/ipv4/ip_forward” to ensure the value is 1, or using “sysctl”:
sysctl net.ipv4.ip_forward
net.ipv4.ip_forward = 1
On the BeagleBoardBlack side (192.168.7.2) issue the command:
/sbin/route add default gw 192.168.7.1
At this stage, if you ping an outside IP address (eg, 165.21.100.88, which is the DNS server for SingTel, my ISP provider) it is possible to get a response.
And so the last step is to do this inside the BeagleboardBlack:
echo “nameserver 165.21.100.88” > /etc/resolv.conf
Here is Android JellyBean installation and setup for BBB:
http://code.google.com/p/rowboat/wiki/JellybeanOnBeaglebone_WithSGX
http://www.ti.com/tool/androidsdk-sitara
Here is a performance testing setup for BBB:
http://www.linux.com/learn/docs/727211-beaglebone-black-part-2-linux-performance-tests
And if you are interested to build linux kernel module for it:
http://wiki.beyondlogic.org/index.php/BeagleBoneBlack_Building_Kernel
And the default kernel modules are:
Module Size Used by
fuse 51875 3
ip_tables 8294 0
x_tables 15072 1 ip_tables
g_multi 55905 2
libcomposite 15228 1 g_multi
rfcomm 25106 0
ircomm_tty 14503 0
ircomm 8846 1 ircomm_tty
irda 89974 2 ircomm_tty,ircomm
ipv6 229989 14
hidp 10112 0
bluetooth 146100 4 hidp,rfcomm
rfkill 16510 3 bluetooth
autofs4 17432 2
Kali Linux produced customization for BBB:
http://docs.kali.org/development/custom-beaglebone-black-image
http://docs.kali.org/armel-armhf/install-kali-arm-on-a-beaglebone-black
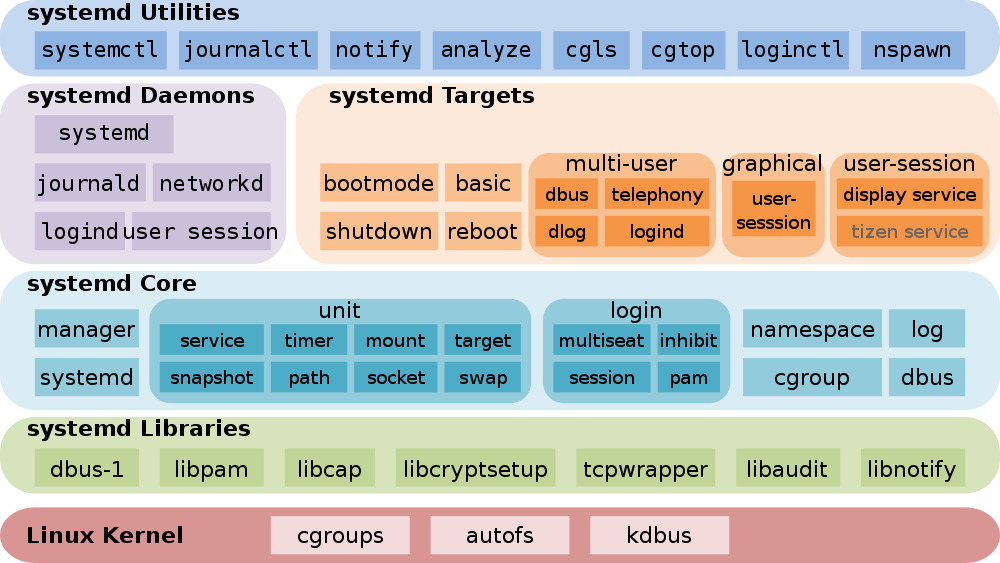
Analysing the systemd (first user process to be executed by Linux kernel, http://en.wikipedia.org/wiki/Systemd):
[ 2.052319] systemd[1]: Inserted module ‘autofs4’
[ 2.054034] systemd[1]: Set hostname to <beaglebone>.
[ 2.307838] systemd[1]: Starting Forward Password Requests to Wall Directory
Watch.
[ 2.308314] systemd[1]: Started Forward Password Requests to Wall Directory W
atch.
[ 2.308562] systemd[1]: Expecting device dev-ttyGS0.device…
[ 2.308658] systemd[1]: Expecting device dev-ttyO0.device…
[ 2.308735] systemd[1]: Starting Remote File Systems.
[ 2.308808] systemd[1]: Reached target Remote File Systems.
[ 2.308882] systemd[1]: Starting /dev/initctl Compatibility Named Pipe.
[ 2.309059] systemd[1]: Listening on /dev/initctl Compatibility Named Pipe.
[ 2.309123] systemd[1]: Starting Delayed Shutdown Socket.
[ 2.309300] systemd[1]: Listening on Delayed Shutdown Socket.
[ 2.309394] systemd[1]: Starting Dispatch Password Requests to Console Direct
ory Watch.
[ 2.309660] systemd[1]: Started Dispatch Password Requests to Console Directo
ry Watch.
[ 2.309937] systemd[1]: Starting Arbitrary Executable File Formats File Syste
m Automount Point.
[ 2.310751] systemd[1]: Set up automount Arbitrary Executable File Formats Fi
le System Automount Point.
[ 2.311283] systemd[1]: Starting udev Kernel Socket.
[ 2.311508] systemd[1]: Listening on udev Kernel Socket.
[ 2.311872] systemd[1]: Starting udev Control Socket.
[ 2.312101] systemd[1]: Listening on udev Control Socket.
[ 2.312172] systemd[1]: Starting Swap.
[ 2.312383] systemd[1]: Reached target Swap.
[ 2.312491] systemd[1]: Starting Journal Socket.
[ 2.312840] systemd[1]: Listening on Journal Socket.
[ 2.313002] systemd[1]: Starting File System Check on Root Device…
[ 2.319574] systemd[1]: Starting udev Kernel Device Manager…
[ 2.351204] systemd[1]: Started Set Up Additional Binary Formats.
[ 2.351465] systemd[1]: Mounting Debug File System…
[ 2.371964] systemd[1]: Starting Apply Kernel Variables…
[ 2.375587] systemd[1]: Starting Journal Service…
[ 2.383259] systemd[1]: Started Journal Service.
[ 2.393031] systemd[1]: Starting Load Kernel Modules…
[ 2.398129] systemd[1]: Mounted Huge Pages File System.
[ 2.398443] systemd[1]: Mounting POSIX Message Queue File System…
[ 2.404412] systemd[1]: Started Machine ID first boot configure.
[ 2.406524] systemd[1]: Starting udev Coldplug all Devices…

Another summary pages:
http://eewiki.net/display/linuxonarm/BeagleBone+Black
http://circuitco.com/support/index.php?title=BeagleBoneBlack
http://circuitco.com/support/index.php?title=Android
Lots of GPIO hardware information:
http://rampic.com/beagleboneblack/
For details on customization this page is absolutely good:
http://icculus.org/~hendersa/android/
In particular a lot of details is covered in Android::Install() and Android::Configure().

{kind=link}
You must be logged in to post a comment.